Bon, il est temps de dépoussiérer un l’endroit pour parler d’un truc que j’ai commencé il y a maintenant … un peu plus d’un an. L’idée, c’est d’écrire dessus pour :
- Partager un peu le sujet, des fois que ça serve
- Formaliser un peu de doc sur les différents choix techniques
Starberrypi c’est quoi ? A la base c’est une idée inspirée par la récupération in extremis d’une antiquité, le minimover 5, remis à neuf, du moins au niveau des moteurs. Pour vous donner une idée de l’âge du truc, le numéro de téléphone du distributeur français indiqué sur le bras comporte 6 chiffres. L’étiquette était peut-être déjà vieille quand elle a été posé, mais quand même, ça sent le milieu des années 80.

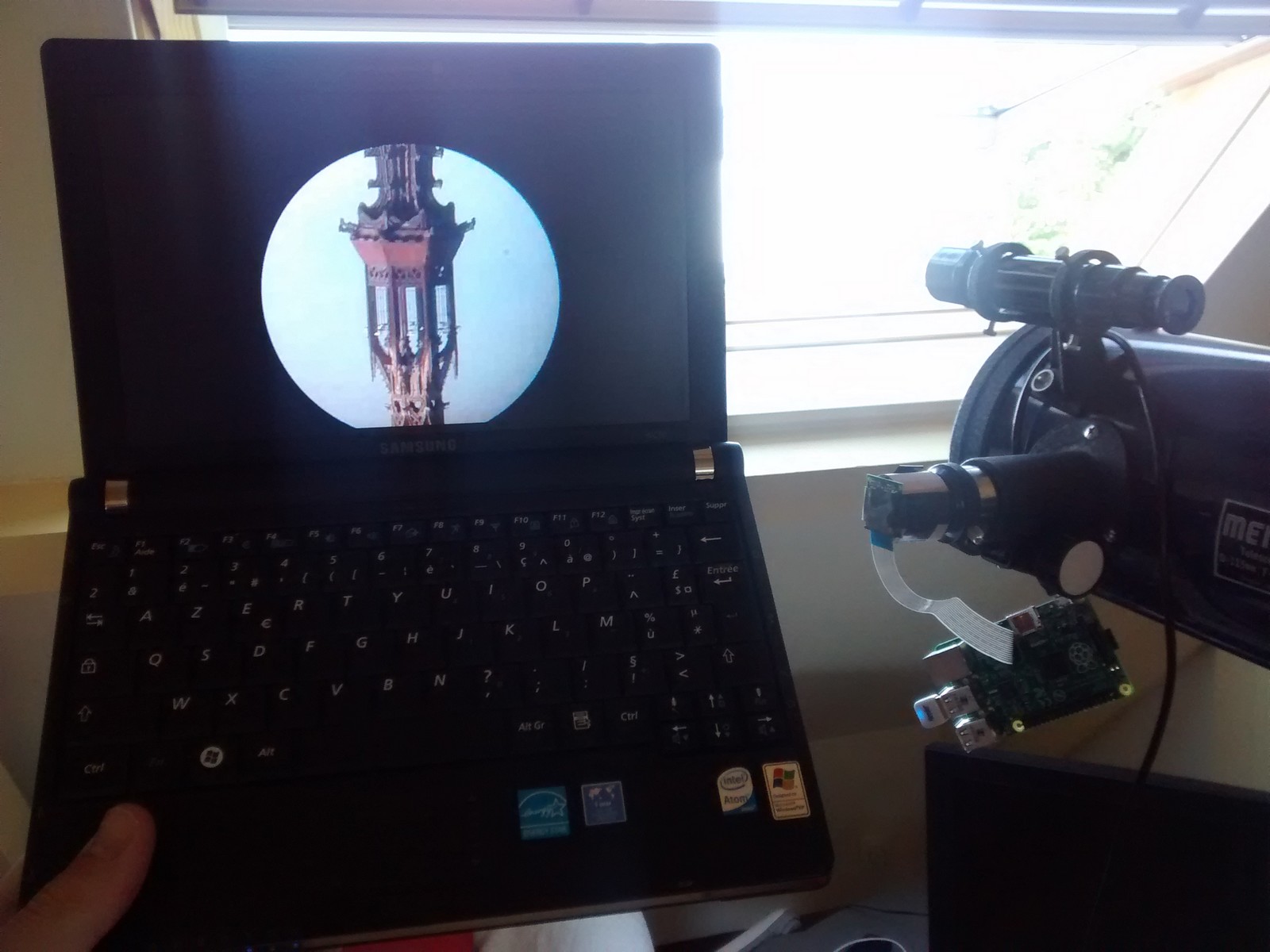
Donc l’idée, c’est de prendre ce bras électromécanique respirant la poussière pour en faire un support de caméra mobile afin de pointer directement devant un machin à prendre en photo, de préférence dans le ciel. Prendre des photos et piloter des moteurs pas-à-pas c’est évidement tout à fait dans les cordes, à première vue, pour un Raspberry Pi.
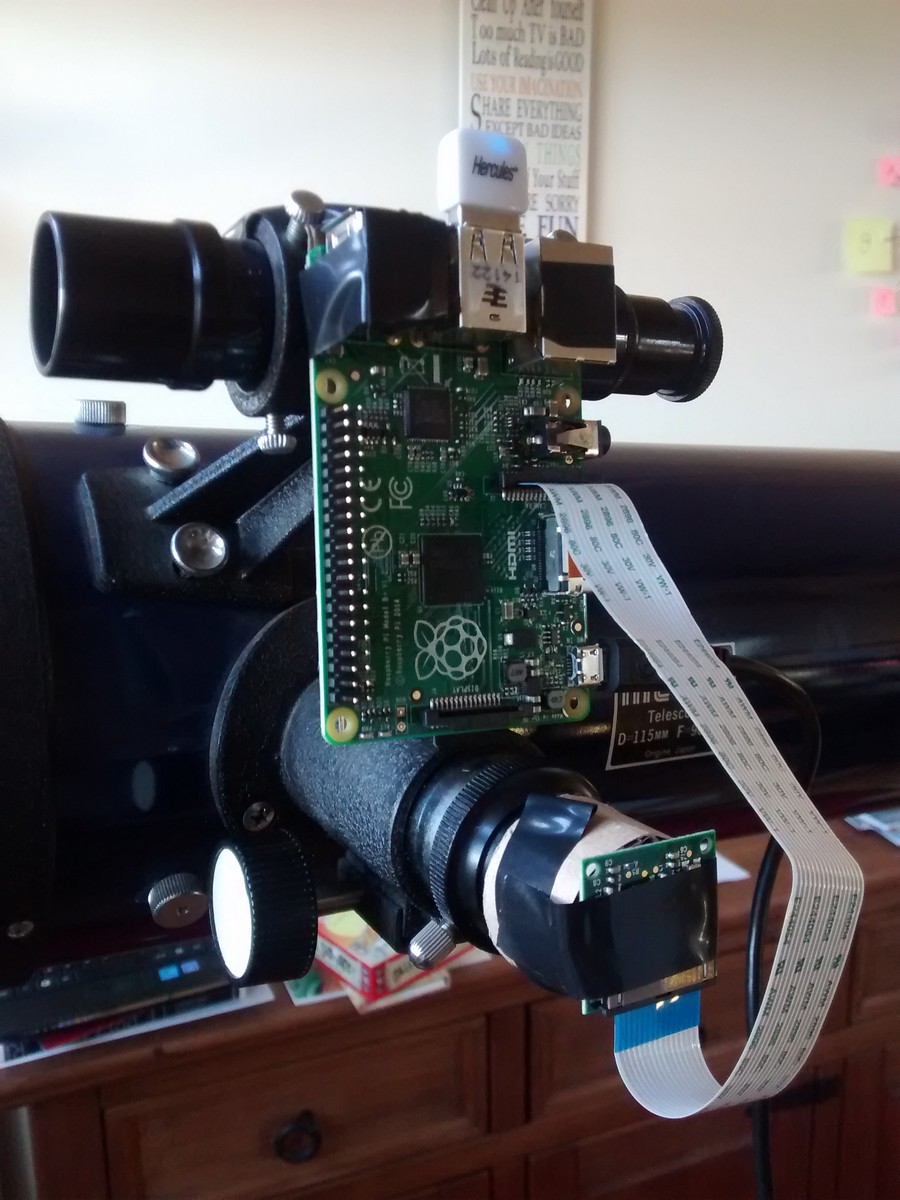
Techniquement niveau matériel, c’est que du déjà-vu ou presque. Une Picam pour l’image, des moteurs pas à pas, seul 2 sur les 6 du minimover suffisent, un peu d’électronique pour les moteurs et basta.
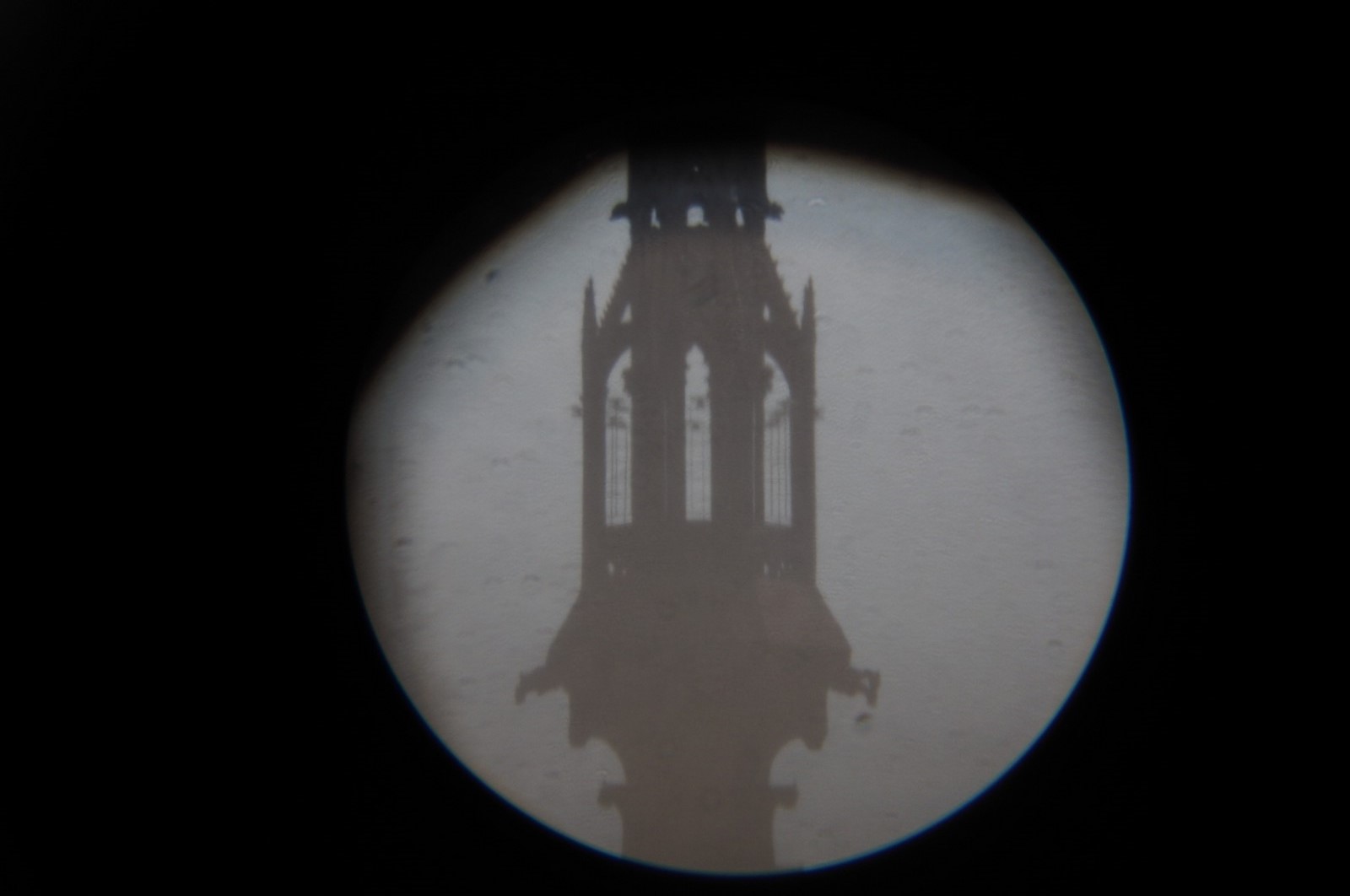
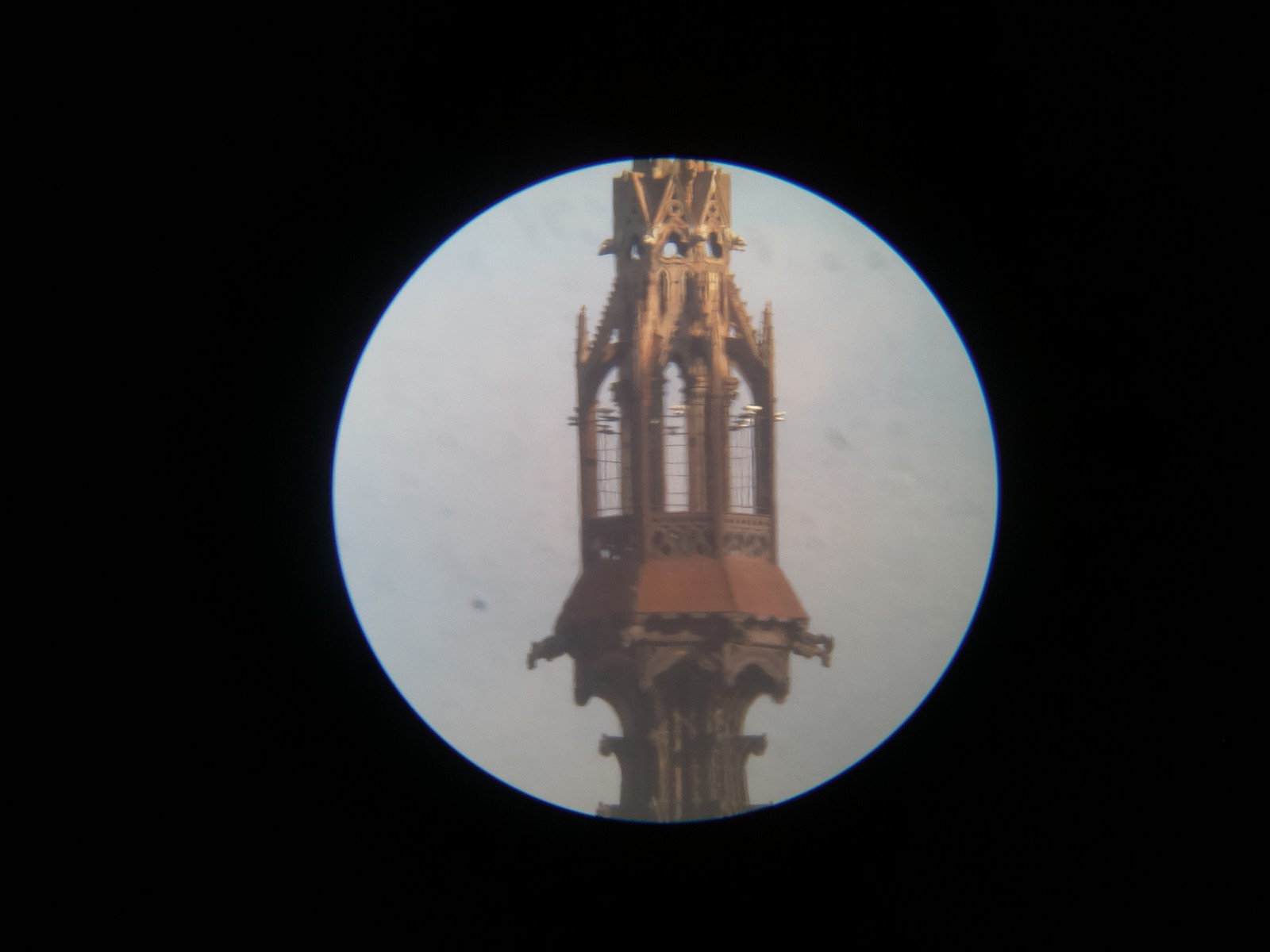
Le détail qui change un peu, c’est l’optique de la caméra. On pourrait faire de l’astrophoto avec la Picam de base, mais… si on monte un objectif de reflex qui zoom un peu, avec la taille du capteur rikiki on obtient un bon gros zoom de porc pour pas cher. Sur le papier, c’est bien, mais ça va avoir quelques conséquences sur l’image (si tu viens de penser à la taille des photosites et au bruit numérique, c’est dans l’idée). Ceci va donc nécessiter un peu de CAO, et d’abus de bien social pour imprimer un adaptateur d’objectif <que j’ai, de préférence> vers la Picam.
Nouveauté pour moi également, trouver un capteur « quivabien » pour me permettre d’aligner le télescope de façon automatique. En gros, la base en astro, c’est l’altitude (hauteur par rapport à l’horizon) et l’azimut (orientation par rapport au nord). Pour l’un, il faut un accéléromètre, pour l’autre il faut une boussole.
Histoire de penser à tout détailler plus tard, voici une liste de tout ce qui m’est passé par les mains pour ce projet :
- Un télescope Newton 115mm-900mm
- Un Raspberry Pi 3
- Des moteurs pas à pas en pagaille
- Un ULN2803
- Un DC+Stepper Motor HAT de chez Adafruit
- Des drivers de moteur pas à pas A4988, de chez Pololu
- Un capteur d’orientation BNO055
- Une boussole CMPS11
- Une boussole CMPS03
- Un Sense Hat de chez Raspberry Pi
- Des meccano
- Des alims externes diverses (5 et 19V notamment)
- Une imprimante 3D Ultimaker 3
Tout n’a pas servi, mais disons que l’expérience gagné sur chaque truc m’a fait progresser pour la réalisation. Je n’ai pas encore parler de soft parce qu’on verra plus tard. Mais spoiler, ça va surtout se passer en python.